
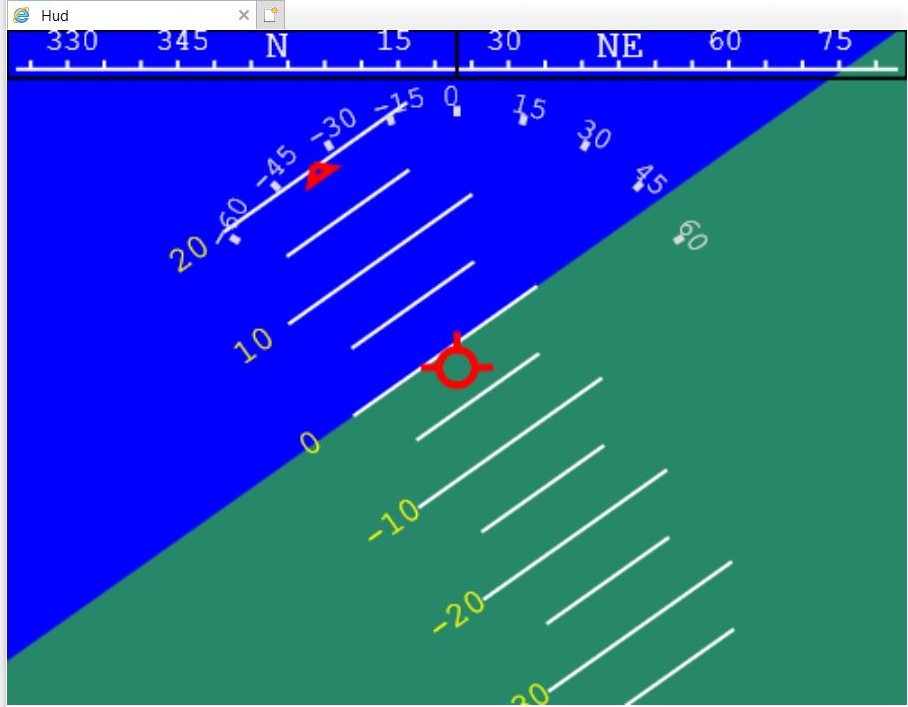
The lightweight software uses the MAVLink protocol for data input and uses a pipeline for HUD visualization. Most of the code is mainly designed to work in conjunction with Ardupilot libraries and is compatible with different web browsers.
The software is tested with a Pixhawk Flight Controller datalink and works sufficiently well. It is currently being developed further, adding heading information and supporting data to the interface.
